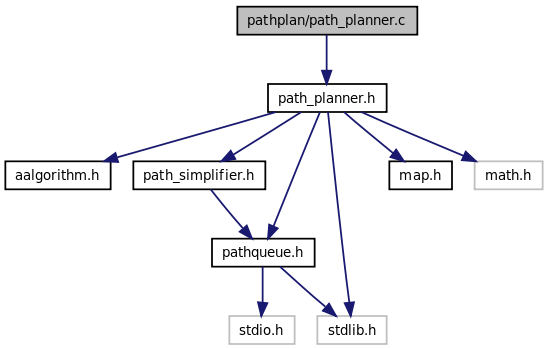
#include "path_planner.h"
Go to the source code of this file.
| #define | DBG printf |
| int | path_planner (double xstart_real, double ystart_real, double xgoal_real, double ygoal_real, PathPoint **simple_path, double *angle) |
Definition in file path_planner.c.
 1.5.3
1.5.3