Returns a list of PathPoints of the path
- Parameters:
-
| xstart | X coordinate in meters |
| ystart | Y coordinate in meters |
| xgoal | X coordinate in meters |
| ygoal | Y coordinate in meters |
| simple_path | A pointer to where the simple path will be stocked |
| angle | A pointer to a double variable where the final angle of the trajectory will be stocked. |
- Returns:
- 1 if a path is founded, 0 if not
- Warning:
- The Shared Map Memory must be init before.
Do not forget to free allocated memory with freePathMemory(). It takes parameters of start and goal points. It returns the number of points of the trajectory and the caller must specify pointers to path and angle.
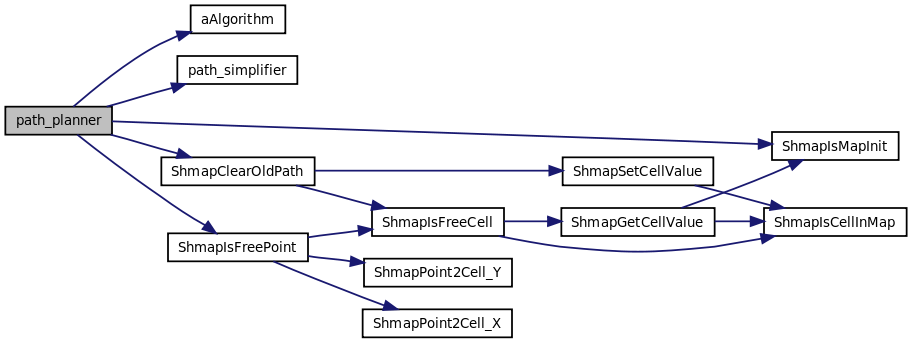
Definition at line 27 of file path_planner.c.
References aAlgorithm(), DBG, _PathPoint::next, path_simplifier(), PP_ERROR_GOAL_IS_OBSTACLE, PP_ERROR_GOAL_NOT_REACHABLE, PP_ERROR_MAP_NOT_INIT, ShmapClearOldPath(), ShmapIsFreePoint(), and ShmapIsMapInit().