Public Attributes | |
| long long | cnt |
| unsigned char | mode |
| pthread_mutex_t | lock |
| pthread_mutex_t | lock_act_pos |
| void * | new_trajectory |
| Temporary storage for new trajectory. | |
| unsigned char | isTrajectory |
| unsigned char | start |
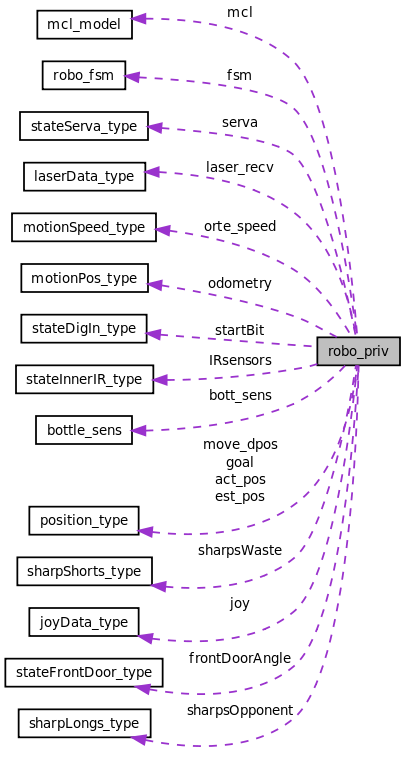
| struct robo_fsm | fsm [FSM_CNT] |
| struct mcl_model | mcl |
| struct position_type | act_pos |
| struct position_type | est_pos |
| struct position_type | goal |
| struct position_type | move_dpos |
| struct laserData_type | laser_recv |
| struct motionSpeed_type | orte_speed |
| struct stateServa_type | serva |
| struct sharpShorts_type | sharpsWaste |
| struct sharpLongs_type | sharpsOpponent |
| struct stateInnerIR_type | IRsensors |
| struct stateDigIn_type | startBit |
|
struct stateFrontDoor_type | frontDoorAngle |
| struct bottle_sens | bott_sens |
| struct motionPos_type | odometry |
| struct joyData_type | joy |
| ORTEPublication * | publisherMotor |
| ORTEPublication * | publisherServa |
| ORTEPublication * | publisherPosition |
| int | bottle_under_belt |
| int | waste_cnt |
Definition at line 78 of file robot.h.
 1.5.3
1.5.3