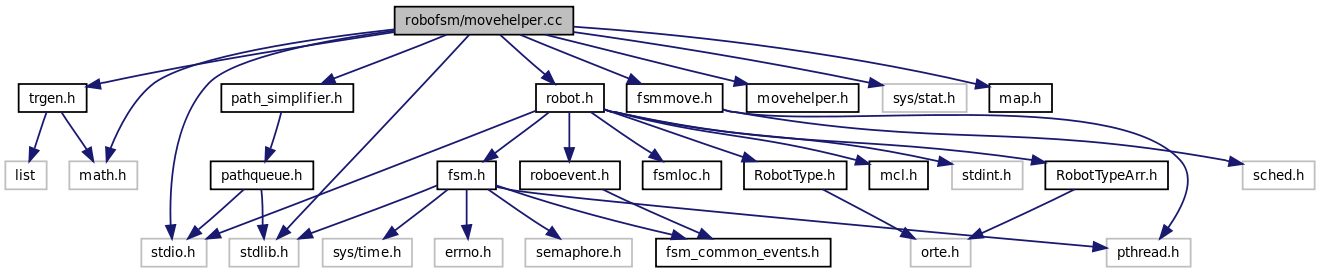
#include "trgen.h"
#include "robot.h"
#include "movehelper.h"
#include "fsmmove.h"
#include <path_simplifier.h>
#include <stdio.h>
#include <stdlib.h>
#include <sys/stat.h>
#include <math.h>
#include <map.h>
Go to the source code of this file.
Functions | |
| static void | robot_trajectory_new_ex (struct TrajectoryConstraints *tc, bool backward) |
| void | robot_trajectory_new (struct TrajectoryConstraints *tc) |
| Initializes new trajectory object for adding points. | |
| void | robot_trajectory_new_backward (struct TrajectoryConstraints *tc) |
| void | robot_trajectory_add_point (double x_m, double y_m) |
| Adds point in absolute coordinates to previously initialized trajectory object. | |
| void | robot_trajectory_add_final_point (double x_m, double y_m, double heading_deg) |
| Adds final point to trajectory objects and starts robot movement. | |
| void | robot_trajectory_stop () |
| Stops actual movement. | |
| void | robot_send_speed (double left, double right) |
| void | robot_goto (double x, double y) |
| Makes move the robot to a target position. | |
Variables | |
| struct TrajectoryConstraints | trajectoryConstraintsDefault |
| double | target_x |
| double | target_y |
Definition in file movehelper.cc.
| void robot_goto | ( | double | x, | |
| double | y | |||
| ) |
Makes move the robot to a target position.
Use path panner to find the trajectory.
| x | X coordinate in meters. | |
| y | Y coordinate in meters. |
Definition at line 147 of file movehelper.cc.
References FSM_SIGNAL, ROBOT_LOCK, and ROBOT_UNLOCK.
| void robot_trajectory_add_final_point | ( | double | x_m, | |
| double | y_m, | |||
| double | heading_deg | |||
| ) |
Adds final point to trajectory objects and starts robot movement.
| x_m | X coordinate in meters. | |
| y_m | Y coordinate in meters. | |
| heading_deg | Heading of the robot at the final point. |
Definition at line 93 of file movehelper.cc.
References Trajectory::finalHeading, FSM_SIGNAL, new_trajectory(), ROBOT_LOCK, robot_trajectory_add_point(), and ROBOT_UNLOCK.

| void robot_trajectory_add_point | ( | double | x_m, | |
| double | y_m | |||
| ) |
Adds point in absolute coordinates to previously initialized trajectory object.
| x_m | X coordinate in meters. | |
| y_m | Y coordinate in meters. |
Definition at line 72 of file movehelper.cc.
References Trajectory::addPoint(), new_trajectory(), ROBOT_LOCK, and ROBOT_UNLOCK.
Referenced by robot_trajectory_add_final_point().


| void robot_trajectory_new | ( | struct TrajectoryConstraints * | tc | ) |
Initializes new trajectory object for adding points.
Path planner will not be used.
| tc | Constrains for the trajectory. |
Definition at line 59 of file movehelper.cc.
References robot_trajectory_new_ex().

Initial value:
{
maxv: 0.3,
maxomega: 1.5,
maxangacc: 1,
maxacc: 0.3,
maxcenacc: 1,
maxe: (double)ROBOT_WIDTH_MM/2.0/1000.0
}
Definition at line 22 of file movehelper.cc.
Referenced by new_goal().
 1.5.3
1.5.3